


There is an increasing need for autonomous systems that are capable effective decision-making in dynamic and unpredictable environments. However, the design of autonomous decision-making systems presents significant challenges, particularly when they have to collaborate with human team members to achieve a common goal. A key question motivating our research is:
“How can machines better relate their actions, including the underlying reasoning motivating those actions, to human team members so as to ensure that humans can effectively supervise and collaborate with them?"
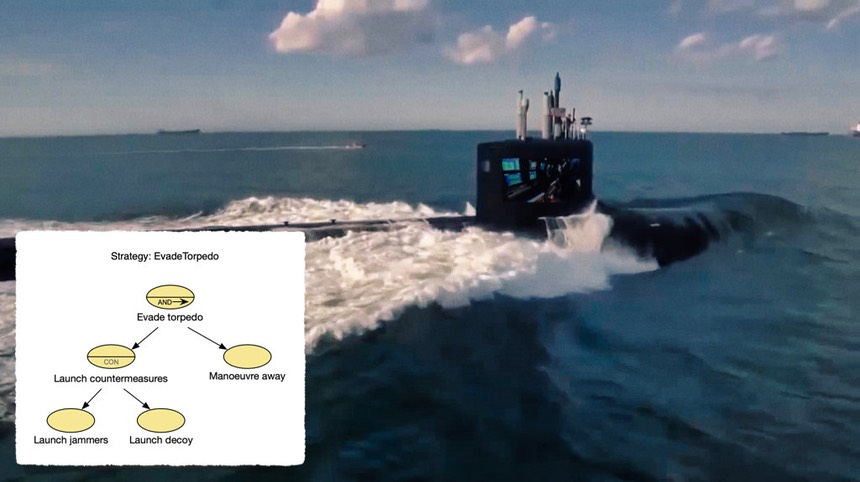
To support the design and implementation of autonomous decision making that are comprehensible to human team members, we have developed a methodology and accompanying tool, TDF (Tactics Development Framework). TDF is a BDI-based (Belief, Desire, Intention) method for designing and representing models of tactical decision making, It uses a high-level diagrammatic representation that is intuitive to domain experts, designers and coders.